

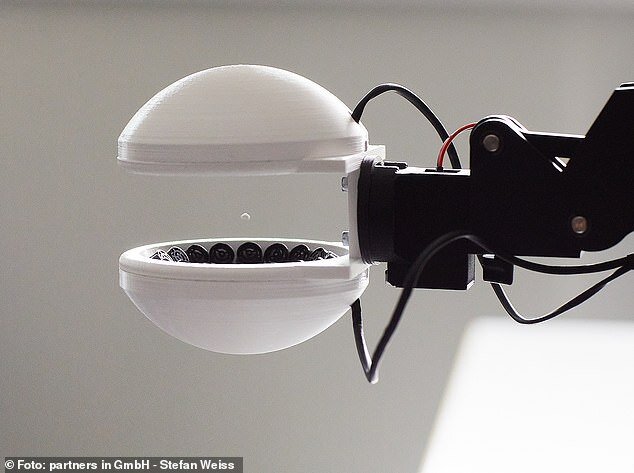
به گزارش ایسنا و به نقل از دیلیمیل، بازوی رباتیک محققان موسسه فناوری فدرال زوریخ از مجموعه بلندگوهای کوچکی استفاده میکند که صدا را در فرکانسها و حجمهای کاملاً کنترل شده منتشر میکند تا بتوانند یک شی را گرفته و حرکت دهند.
"مارسل شاک"(Marcel Shuck) پژوهشگر این مطالعه گفت: امواج صوتی بلندگوها یک میدان فشار(فشار صوتی) را ایجاد میکنند که یک شیء را در خود نگه میدارد. "گیربکس صوتی"(acoustic gripper) برای کارهای ظریف مانند مونتاژ ساعت یا میکروتراشه که در آن هرگونه آسیب به صفحههای لمسی هزینه زیادی خواهد داشت، ایده آل خواهد بود.
امواج صوتی که برای جابجایی یک شی مورد استفاده قرار میگیرند، میتوانند با داشتن صوتی که از چندین جهت میرسد آن شی را به جهات مختلف منتقل کنند.
شاک در ادامه گفت یک گیربکس رباتیک معمولی در مواد نرم و لاستیکی مانند پوشانده شده است که میتواند به اشیاء شکننده آسیب برساند و موارد ظریف را آلوده کند.
از گیربکس فراصوت( آکوستیک) بیش از ۸۰ سال پیش در اولین سفرهای فضایی مورد استفاده قرار گرفته است و در آنجا یک میدان فشار از امواج مافوق صوت ایجاد میکند که انسان قادر به دیدن یا شنیدن آنها نیست.

نقاط فشار باعث میشوند که امواج صوتی روی هم قرار بگیرند و اشیاء کوچک در این نقاط به دام میافتند. این فناوری در حال حاضر نمونه اولیه است و شامل چندین بلندگو کوچک است که در دو بخش ربات قرار گرفتهاند و به سمت یکدیگر حرکت میکنند تا زمینه فشار را ایجاد کنند.
شاک و دیگر پژوهشگران این مطالعه موفق به توسعه نرم افزاری شدند که آنها را قادر میساخت بلندگوها را کنترل کنند تا نقاط فشار صوتی را تنظیم کرده و اشیاء را به اطراف منتقل کنند. در حال حاضر این یک روند نسبتاً ثابت است اما هدف پژوهشگران این است که بتوانیم بدون اینکه شیء به زمین بیفتد موقعیت را در زمان واقعی تغییر دهیم. در حال حاضر، محققان میتوانند اشیاء کوچک مختلفی را به اطراف منتقل کنند، اما مجبورند از نرم افزار استفاده کنند تا گیربکس را به شکل جسم تنظیم کند.
به گفته پژوهشگران گیربکس فراصوت نیاز افراد به مجموعه گستردهای از گیربکسهای گرانقیمت با دقت بالا را از بین میبرد. شاک گفت ربات حامل گیربکس حتی نیازی به دقت خاصی ندارد. قرار گرفتن دقیق اشیا توسط امواج صوتی کنترل می شود نه بازوی رباتیک. این نوآوری احتمالاً مورد توجه صنعت ساعت سازی قرار خواهد گرفت.
انتهای پیام



نظرات