

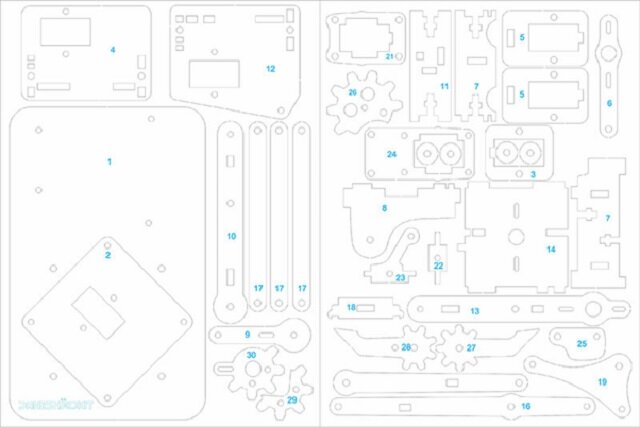
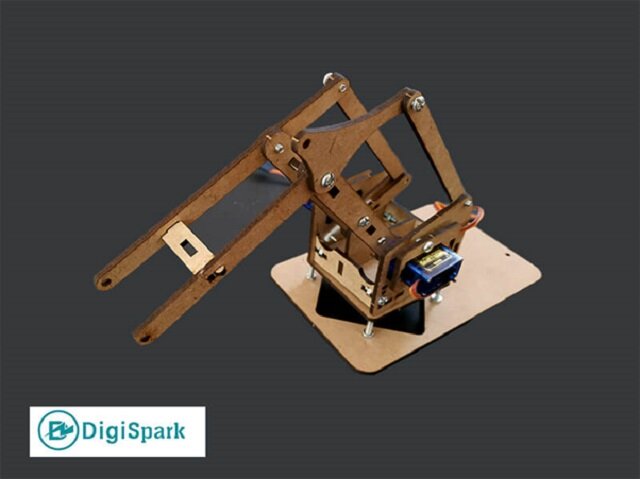
به گزارش ایسنا، بنابر اعلام دانشجوکیت، وسایل رباتیک برای ساخت ربات بازو بسته به کارایی آن متفاوت خواهد بود. با توجه به اینکه ربات در چه محورهایی امکان حرکت دارد، بر اساس درجه آزادی شناسایی میشود. در ربات بازو MeArm با استفاده از صفحه شاسی پلکسی و یا چوب ۳ میلیمتری میتوانیم یک ربات بازو کوچک و کاربردی بسازیم. ربات بازو MeArm دارای سه درجه آزادی هست. میتوان از سختافزارهای متعددی برای ساخت آن استفاده نمود. نوعی ورق چوبی MDF با ضخامت در حدود ۳ میلیمتر وجود دارند. این ورق چوبی، یکی از وسایل رباتیک پرکاربرد در اکثر پروژههای رباتیکی هست؛ بنابراین در ساخت ربات بازو از همین جنس استفاده خواهیم کرد. قطعات ربات بازو MeArm توسط تکنولوژی برش لیزر آماده شدهاند. پس از آن به کمک ۲ عدد جوی استیک ربات بازو را کنترل میکنیم. به هنگام تهیه وسایل رباتیک برای ساخت این ربات بازو، دو صفحه لیزر شده تحویل خواهید گرفت؛ مانند تصاویری که در ادامه این آموزش مشاهده خواهید کرد. ابتدا قطعات هر شیت را باید جدا کرده و پس از بررسی آنها را مانند پازل مونتاژ کنیم. تا در نهایت یک ربات بازو مانند تصویر بالا داشته باشیم.
قطعات رباتیک بهکاررفته در ربات بازو
قطعات رباتیک در ساخت این ربات بازو از جنس ورق چوبی ۳ میلیمتری استفاده شده است. برای اتصال این قطعات چوبی لیزر شده، بایستی طبق نقشه همراه کالا، قطعات رباتیک را بدنه اصلی جدا کرده و با پیچ و مهره به هم متصل کنیم؛ مانند تصویر زیر که یکی از بخشهای اصلی ربات بازو مونتاژ شده است. نکتهای که در ساخت ربات بازو Mearm وجود دارد، این است که حتما به ۴ عدد سرو موتور کوچک نیاز دارد. در ادامه راجع به این قطعه توضیح خواهیم داد. به عبارت شاسی و بدنه ربات توسط یک عدد سرو موتور به هم متصل میشوند. این سرو موتور نقش شافت اصلی برای نگهداری بازو را بر عهده دارد. پیچهایی که در تصویر زیر جهت ایجاد اتصال بهکار رفته است، توجه کنید.

همهی مراحل ساخت را طبق نقشه همراه کالا ادامه دهید. تا اینکه ظاهر اصلی ربات مانند تصویر زیر تشکیل شود. همانطور که در تصویر مشاهده میکنید، یک بخش اصلی ربات بازو توسط چهار عدد پیچ بلند به شاسی ربات متصل شده است. روی شاسی مکانی جهت نصب برد آردوینو وجود دارد. تا توسط آن بتوانیم به هر چهار سرو موتور Servo Motor فرمان بدهیم. البته میتوانید از جوی استیک جهت سهولت در ارسال فرمان برای جابجایی ربات بازو استفاده کنید.
ساخت گریپر ربات بازو توسط سرو موتور Servo Motor
سرو موتور نوعی موتور الکتریکی با شافت دندانهدار میباشد. سرو موتور قابلیت جابجایی بهصورت زاویه را دارد. به عبارتی شافت آن با مقیاس زاویه، قابلیت چرخش دارد. بهعنوانمثال میتوانیم تعریف کنیم که شافت ۴۰ درجه چرخش به راست یا به چپ داشته باشد. روش شناخت سرو موتور بر اساس نوع دندانهها و زاویه چرخش آن، میباشد. در این پروژه از سرو موتور SG۹۰ با قابلیت چرخش شافت ۳۶۰ درجه استفاده کردهایم. برای مونتاژ بخش نهایی ربات بازو یعنی همان گریپر باید مانند تصاویر زیر عمل کنیم. وسایل رباتیکی مخصوص به گریپر را از بین قطعات اصلی جدا کرده و توسط یک عدد سرو موتو به هم متصل کنید.
در این بخش مونتاژ گریپر ربات به اتمام رسید. حال باید گریپر را به بدنه اصلی ربات بازو نصب کنید. اتصال این بخش به سازه اصلی ربات بسیار ساده است. پس از این ربات بازو آماده است و میتوانید در این قسمت وارد مرحله کد نویسی شوید. چنانچه سؤالی در خصوص راهاندازی و مونتاژ این ربات جذاب دارید، میتوانید به هنگام خرید کالا، از طریق بخش نظرات سوا لاتتان را مطرح کنید.
انتهای رپرتاژ آگهی



نظرات